
Adopt the base environment
Start with the core mission environment and its data model, logging, and operator interface.
The platform
Sahtune. Attune.
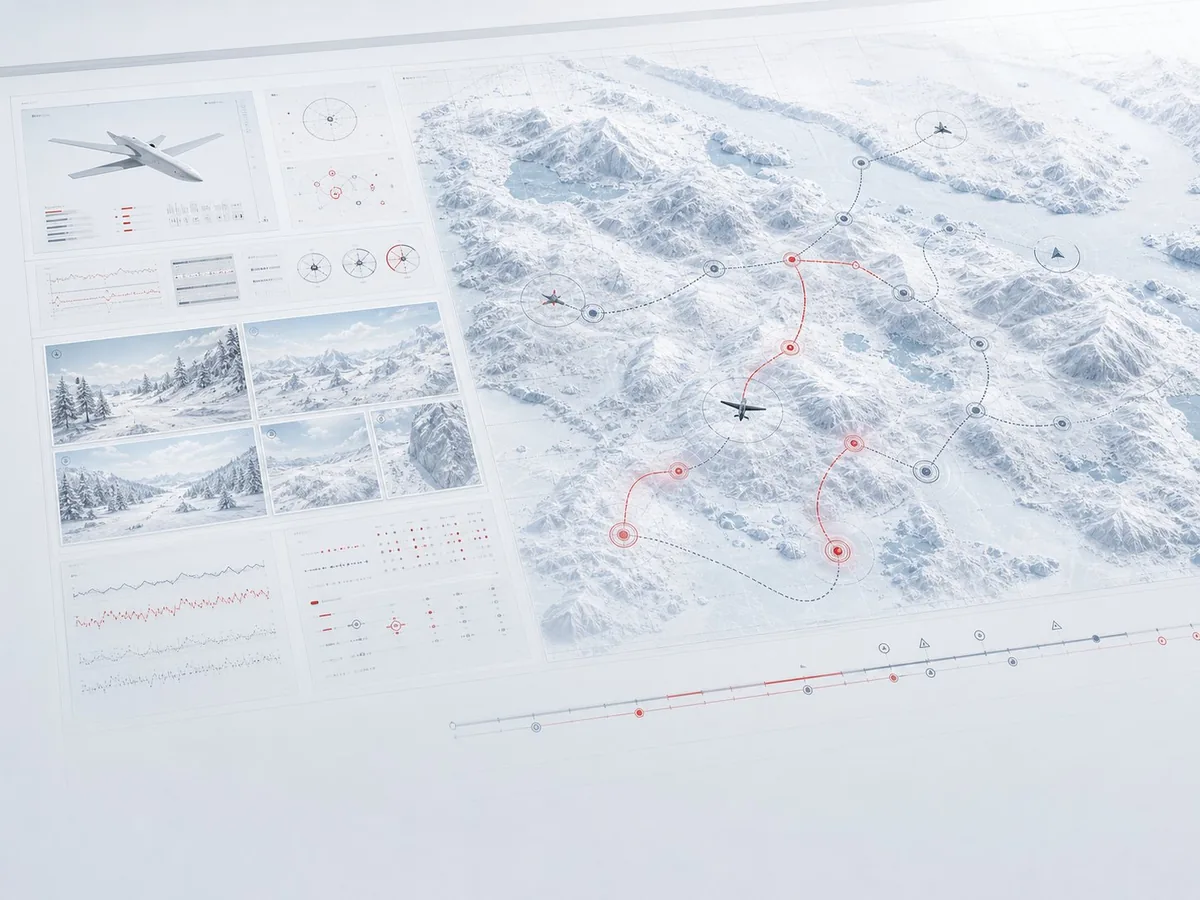
Sahtune is the mission environment for uncrewed systems. It connects aircraft, sensors, operators, autonomy, mission data, logs, and field hardware into one modular software environment.
Sahtune is the mission environment for uncrewed systems. It is the software layer that ties the stack together — a modular environment where mission software, sensor data, operator tools, autonomy, and logging share one data model and one integration framework. It is under active development; we describe the architecture honestly as it matures, not as a finished operational system.
| Layer | Role |
|---|---|
| Core | Mission software container, data model, operator interface, logging, and integration framework. |
| Software Products | Modular capabilities that run inside the environment: autonomy, perception, fusion, ground control, coordination. |
| Hardware Systems | UAVs, power systems, payloads, and edge-compute platforms that run or support the environment. |
| Validation Layer | Bench, ground, flight, and post-mission evidence capture. |
 In Development
In Development The autonomy layer that turns an uncrewed platform into a dependable mission capability.
 In Development
In Development AI-assisted detection and scene understanding for uncrewed systems.
 Under Validation
Under Validation The layer that combines multiple sensor streams into one coherent operating picture.
 Planned
Planned The operator workspace for planning, monitoring, and reviewing uncrewed missions.
 Pipeline
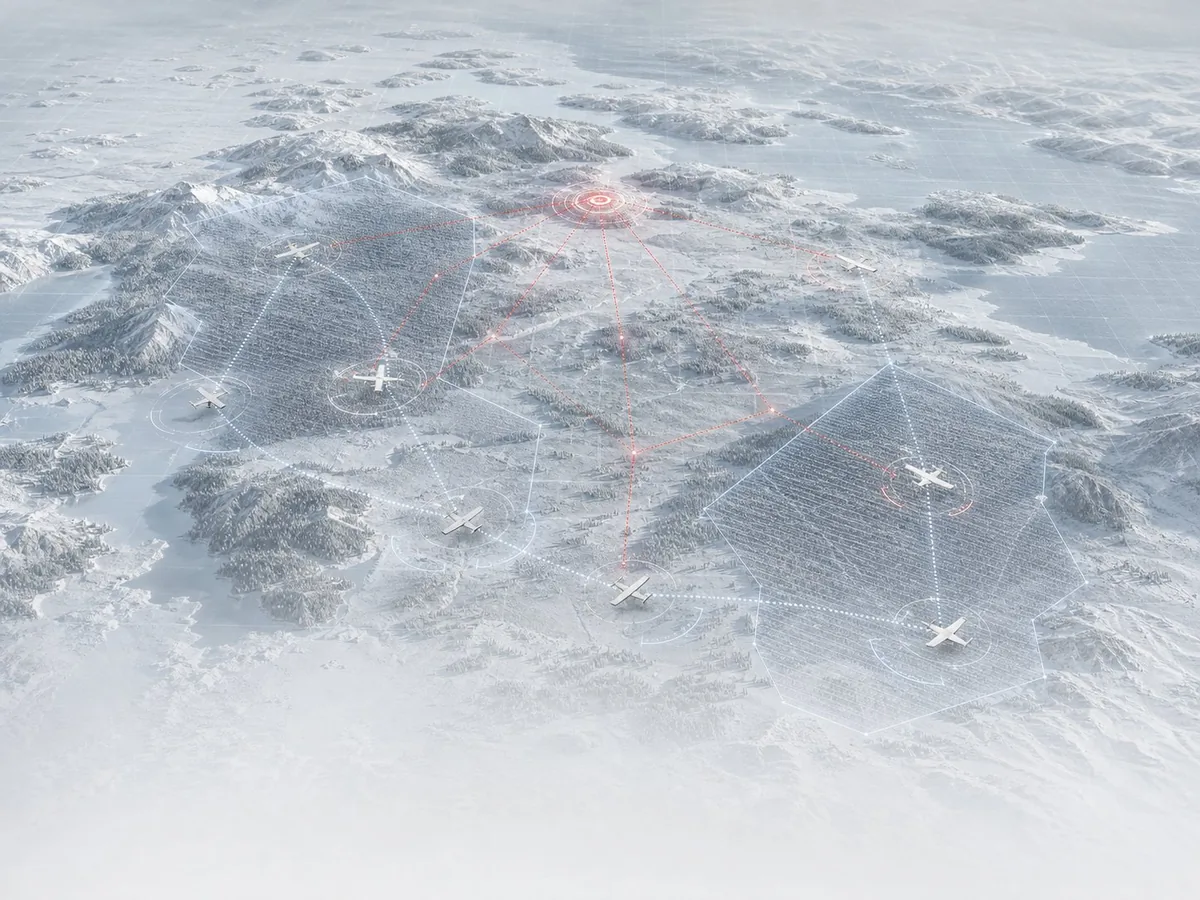
Pipeline Coordinated multi-UAV behaviour from a shared mission layer.
Sahtune is designed against real hardware constraints — constrained onboard compute, limited power, thermal limits, and intermittent links. The hardware platforms run the environment; KX-Power Rail and edge-compute modules make the physical system visible to the software. The KX-1 Raven development platform is where this integration is validated first.
The environment captures structured evidence across simulate, bench, ground, and flight stages. Logs, system health, and AI outputs are recorded so behaviour is traceable and repeatable — the basis for honest status claims rather than marketing ones.
Start with the core mission environment and its data model, logging, and operator interface.
Turn on autonomy, perception, fusion, ground control, or coordination as capabilities — not separate stacks.
Integrate with KX hardware, or with platforms validated against the same architecture.
Request an unclassified briefing on the mission environment and its products.