


Requirements first
Every subsystem starts from a defined mission need and measurable target.
Ottawa, Ontario, Canada
Software-defined uncrewed systems. Hardware-validated for the field.
We build autonomy software on the hardware required to trust it in the field. Kanatir develops the mission environment, the software products inside it, and the uncrewed systems that run it — validated step by step, not overclaimed.
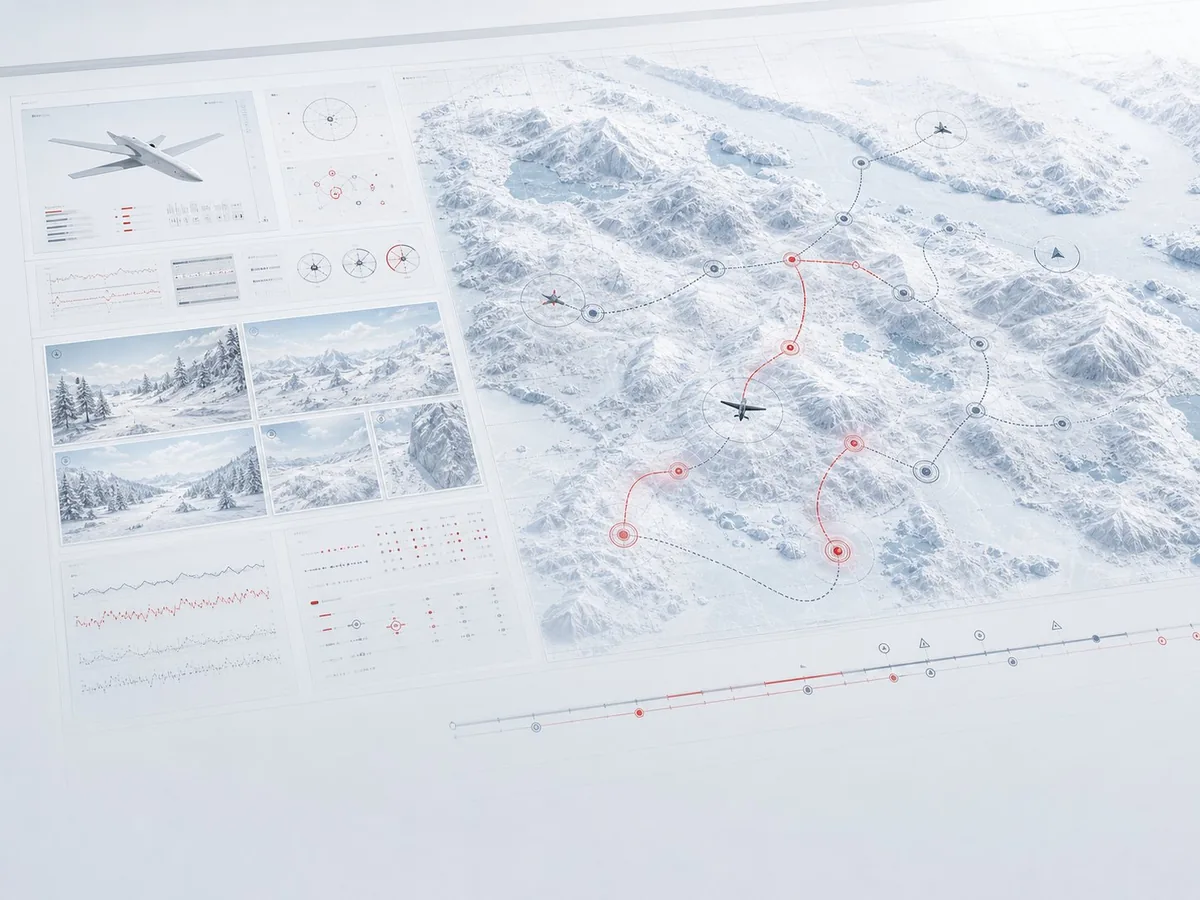
Sahtune is the mission environment for uncrewed systems. It connects aircraft, sensors, operators, autonomy, mission data, logs, and field hardware into one modular software environment.
Sahtune is the umbrella. The software products run inside it; the hardware platforms run it. Customers can adopt the base environment and activate the capabilities they need — autonomy, perception, fusion, ground control, or multi-UAV coordination.

Modular capabilities that run inside the mission environment. Each is in active development — status reflects where it is on the validation path.
 In Development
In Development The autonomy layer that turns an uncrewed platform into a dependable mission capability.
 In Development
In Development AI-assisted detection and scene understanding for uncrewed systems.
 Under Validation
Under Validation The layer that combines multiple sensor streams into one coherent operating picture.
 Planned
Planned The operator workspace for planning, monitoring, and reviewing uncrewed missions.
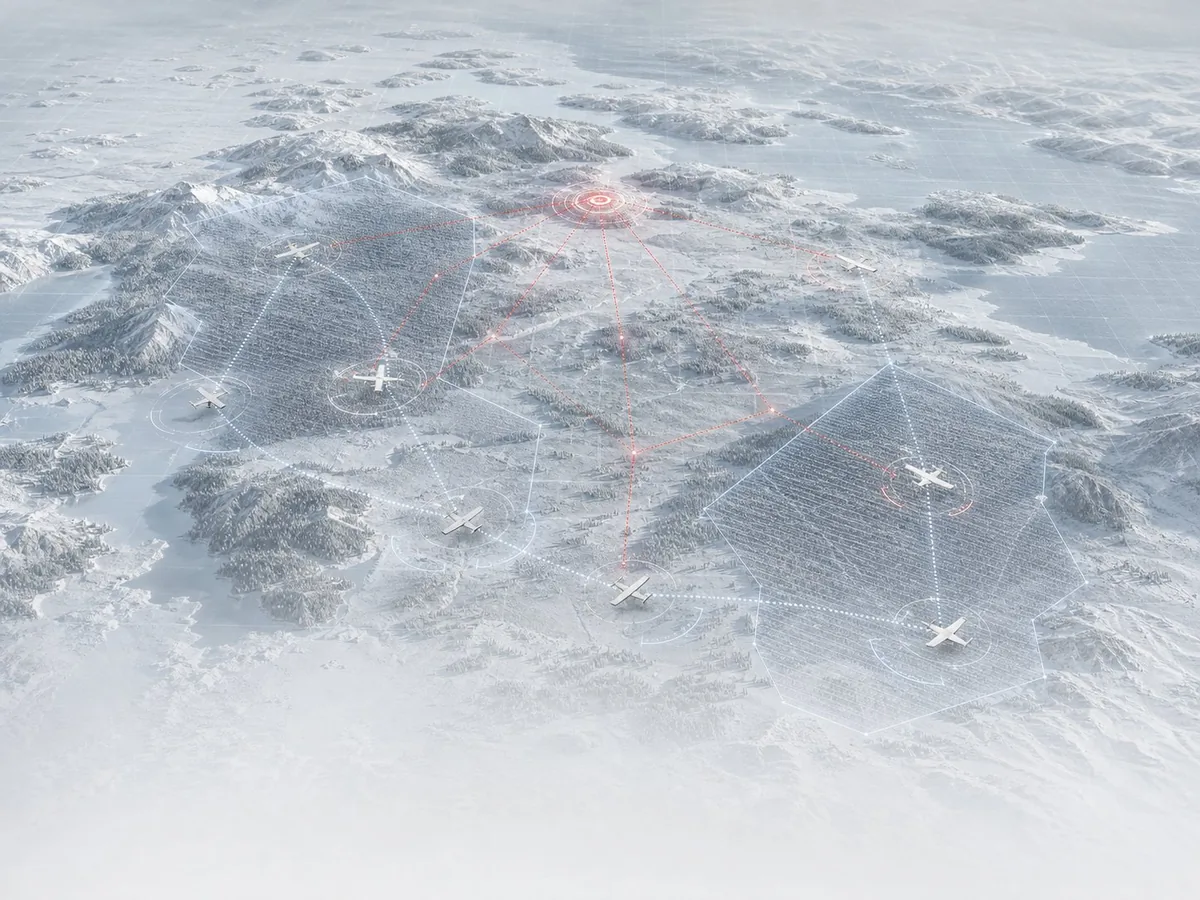 Pipeline
Pipeline Coordinated multi-UAV behaviour from a shared mission layer.
Uncrewed systems and power hardware. KX-1 Raven is the current development platform; the others are forward-looking platform concepts powered by the same architecture.
 In Development
In Development A multirotor development platform for proving autonomy, avionics, power, and payload integration.
 Pipeline
Pipeline A compact rapid-response UAV for close-range awareness and perimeter missions.
 Pipeline
Pipeline A medium-range tactical platform for deployable field operations.
 Pipeline
Pipeline A long-range uncrewed system concept for remote and northern operations.
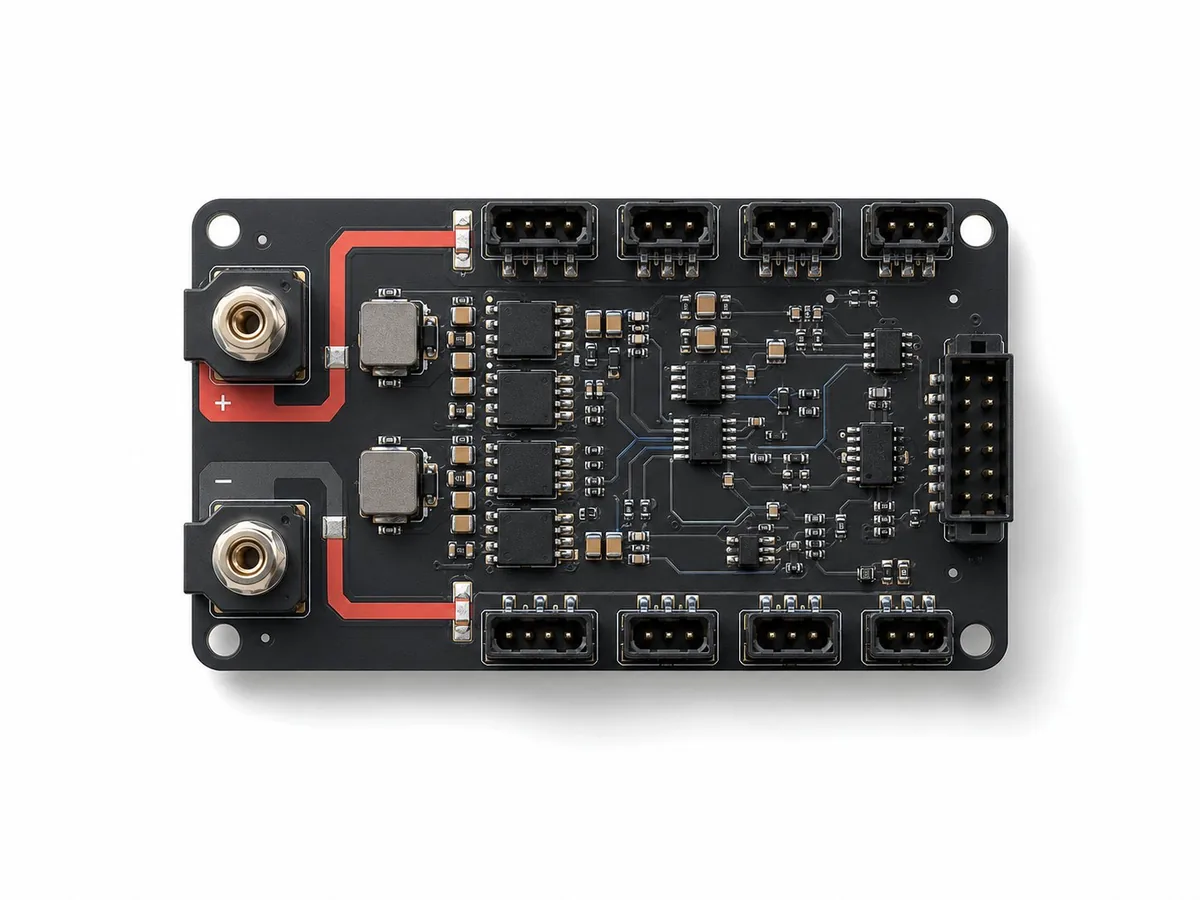 Active Development
Active Development Intelligent power distribution for UAVs and field robotic systems.
Model the mission logic, system behaviour, and expected operating limits before hardware risk is introduced.
Validate power, compute, sensors, payloads, and software interfaces in controlled conditions.
Verify integration, operator workflow, telemetry, failsafes, and repeatability before flight.
Mature the system through controlled flight envelopes, documented results, and structured failure analysis.
Every subsystem starts from a defined mission need and measurable target.
Bench, ground, and flight testing are documented so results are repeatable and failures are understood.
Field serviceability is treated as a design input: modular parts, clear interfaces, accessible logs, and maintainable hardware.
Canada's geography sets a hard baseline: cold-weather starts, long transit distances, intermittent communications, remote recovery, and limited field support. Kanatir treats these as engineering constraints from the beginning and aligns its systems with the reliability, documentation, and interoperability expectations of allied operators.
For government, partnership, and technical discussions, request a briefing. Please keep all details unclassified and unrestricted.